Advanced Industrial Machines: Key Technologies And Automation Capabilities
Control Architectures for Advanced Industrial Machines: Types and Trade-offs
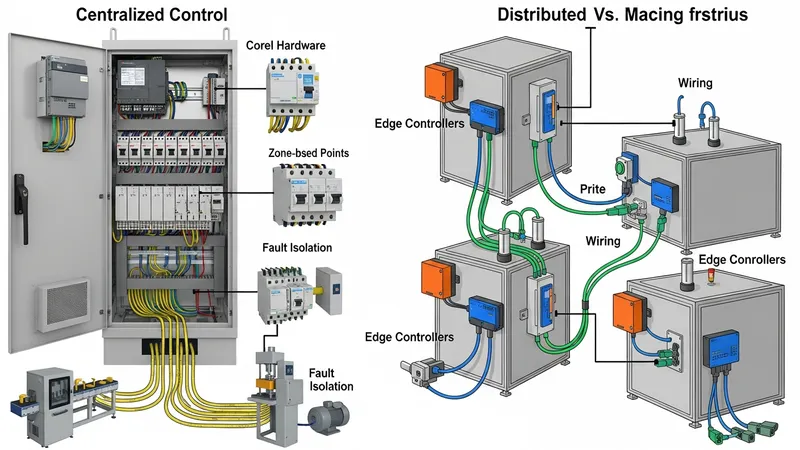
Control architectures for advanced industrial machines may range from single-controller setups to distributed frameworks that place processing near sensors and actuators. Centralized PLC-based designs often simplify engineering for smaller systems, while distributed control approaches can reduce wiring and improve modularity for larger installations. Real-time communication protocols and synchronization methods are critical when multiple controllers coordinate motion or process steps. Selection typically balances latency requirements, fault isolation, and scalability rather than claiming universal superiority for any single approach.
Timing and determinism can influence whether an architecture uses hard real-time controllers or mixes soft real-time services for higher-level tasks. Motion-critical loops often remain on dedicated hardware to preserve cycle-to-cycle accuracy, while supervisory tasks such as recipe management or data logging may run on separate servers. Designers may partition functionality so that shutdowns or diagnostics at one layer do not propagate unnecessary downtime to other layers. This separation often helps maintain availability while allowing for progressive feature additions.
Integration of safety functions typically requires architectures that support safety-rated controllers or certified safety modules. Safety architectures can be implemented as redundant or failsafe circuits that operate independently of normal control logic. Where machines interact with operators or other equipment, safety functions often include interlocks, safe torque off (STO) on drives, and monitored E-stops. Such designs may be assessed according to recognized safety frameworks to determine required performance levels and verification steps.
Practical considerations for architecture selection often include maintainability, commissioning time, and the availability of engineering tools. Modular architectures can permit parallel development and simpler replacement of faulty subsystems, which may reduce mean time to repair. Conversely, distributed systems may demand more sophisticated diagnostics and network management. Trade-offs should be evaluated against production requirements and available engineering resources, acknowledging that typical environments prioritize predictable operation and safety compliance.